 平台热线
平台热线



一、川崎机器人各坐标系下的手动操作了
⑴ 打开电源、气源 (总电源、变压器箱电源、控制器电源、机器人气泵)。
⑵ 【A】+【运行】 右上角[RUN]灯亮 按【暂停】, [RUN] -> [HOLD]灯亮 。
⑶ 【A】+【马达开】 右上角[MOTOR]灯亮。
⑷ 手动速度选择:按【手动速度】选择2或3(速度1-2-3-4-5-1循环切换)。
⑸坐标系选择: 关节坐标(JOINT)/基坐标(base)/工具坐标(TOOL)可循环切换,首先选择关节坐标(亦称各轴坐标)。
⑹握杆握下:握杆轻握,听到“咔”声响,表示握杆成功。
⑺ 机器人移动: 按下X-/X+、Y-/Y+ 、Z-/Z+ 、 RX-/RX+、RY-/RY+ 、RZ-/RZ+ ,机器人将分别移动各个轴;
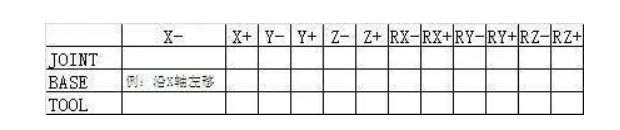
⑻坐标系变换为基坐标(base)和工具坐标(TOOL),再分别执行上述⑺的操作,同时记录下各运行动作状态。
记录表格:
二、川崎机器人三点位置示教和再现
⑴ 开机、示教准备(参见各坐标系下的手动操作)
⑵ 【A】+【程序】,输入文件名,如:3151 。
⑶ 示教一个点,按【记录】键,记录位置1 同理再记录位置2、位置3 。
⑷ 将示教开关打到【REPEAT】 注:控制器和示教器上均要打到[REPEAT]
⑸ 再现。运行 【A】+【马打开】,【A】+【运转】,【A】+【循环启动】(指示灯判断)。
⑹ 运行模式选择 步骤连续/步骤单步,再现连续/再现一次。
⑺ 再现结束 按【暂停】或“紧急停止”按钮或开关打到示教。
三、川崎机器人在现有模式下动作命令的执行
川崎机器人可以执行各种单个的动作,各种命令在软键盘输入画面上输入,在命令前加"DO”命令标识,按[ENTER]软键盘(参见下图)执行。下面列举常见的动作命令:
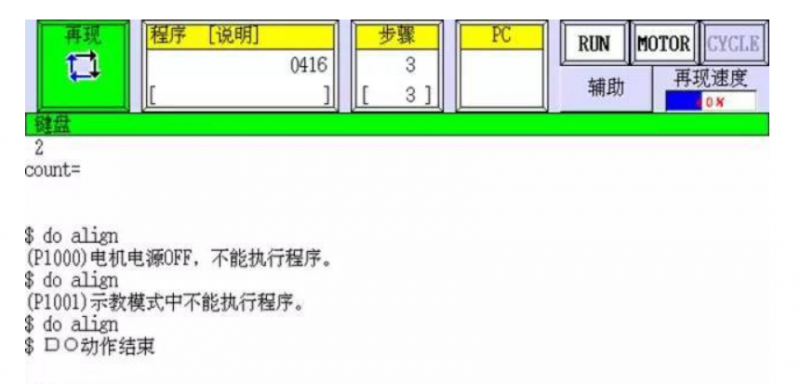
①对齐命令-ALIGN
⑴打到再现模式、马达开、运转
⑵【菜单】-[键盘]
⑶ > DO ALIGN 回车
⑷ 再回到示教模式,准备下一步操作
技巧:输入命令历史记录[CTRL+L] 键切换
③修改P1点的位置数据
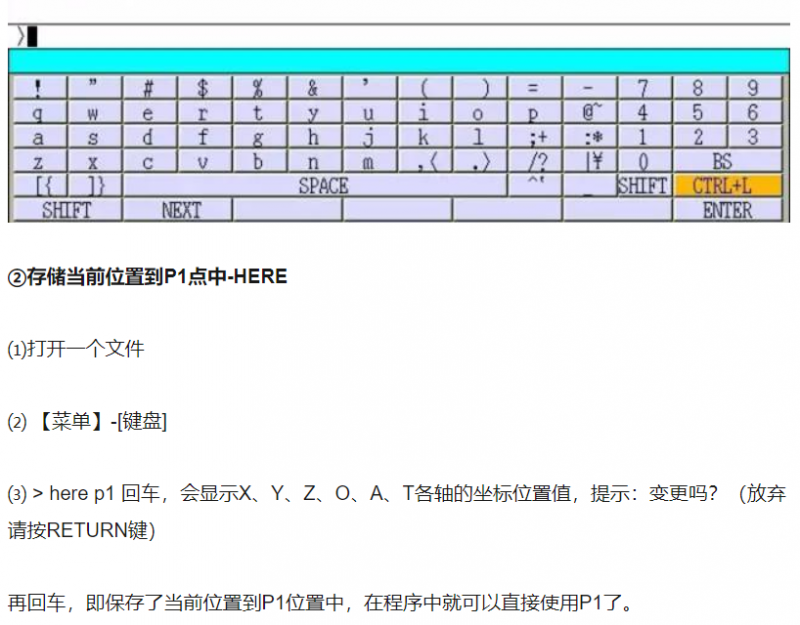
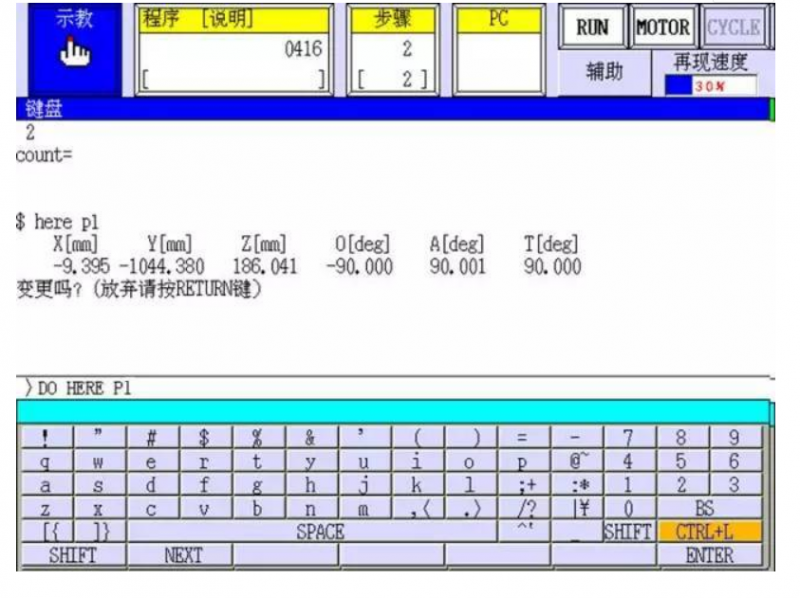
如果要修改某点(如P1)的位置数据,只要在上述显示数据后(有提示信息:变更吗?(放弃请按RETURN键))直接输入各个数据即可,其中X、Y、Z三轴是以mm为单位的坐标值。O、A、T表示三个旋转坐标角度。

⑤机器人原点设定
机器人可以设置2个原点,分别是HOME 和 HOME2,设置原点命令分别是:SETHOME, HERE 和 SET2HOME, HERE。将机器人手动操作运行到标准位置,然后执行上述命令即可。
⑥机器人回原点命令-HOME/HOME2
机器人执行程序过程中或某阶段程序结束后,一般需停在原点位置“待机”,等待下一步命令,在程序中只要书写命令“HOME”或“HOME2”即可,而单独执行回原点功能,则在HOME或HOME2前加“DO”即可。注意,单独命令的执行都是在“再现”模式下进行的。